The poster depicting famous inventions by Black figures throughout history should show the invention George Crum is widely credited with: the potato chip.
Instead, the picture labeled with Crum’s name shows a firefighter in an ominous gas mask next to a stop light. There are no potato chips to be found.
But there is a typo-ridden description of Crum that reads: “Created the popular crispy snack when a customer is polated thinner fried potatees.”
For $4, teachers can have the privilege of downloading that poster, a slideshow about Black inventors, and a seven-minute video from Teachers Pay Teachers, a marketplace for teachers to find lesson plans, classroom decor, activities, and more. The site, which rebranded as TPT in 2022, is education’s answer to Etsy.
For $1.99, they could also download an alphabet coloring worksheet missing the letter F. And for just $1.50, they could get a poster of U.S. presidents that uses an asteroid hurtling toward anti-slavery demonstrators to illustrate the idea that Martin Van Buren was resilient.
Teachers Pay Teachers is a platform used by 85% of pre-K-12 educators in the U.S., its parent company said in a 2023 press release. It has long been controversial, with some educators and curriculum developers casting doubt on the quality of resources up for sale. But it inspired trust in other teachers due to the premise baked into its name. Now that trust is eroding, and it’s because of something educators have noticed while shopping. Increasingly, some of Teachers Pay Teachers’ resources appear to be AI-generated.
Moreover, some of the AI-generated content that hasn’t been vetted very well includes obvious errors, slipshod graphics, and questionable information, according to a Chalkbeat review of material on Teachers Pay Teachers.
In an emailed statement, Paul Mishkin, CEO of IXL Learning, TPT’s parent company, wrote that the company uses “algorithmic tools to identify and demote stores associated with low-quality, AI-generated content.”
“These measures are already highly effective, such that AI-generated products account for a minuscule fraction of a percent of TPT’s sales,” Mishkin wrote.
Teachers are expected to create a lot of material, sometimes on a time crunch or during the summer when they’re not paid, said Jeff Carpenter, an education professor at Elon University. That pressure to create instructional material leads them to turn to Teachers Pay Teachers or similar sites.
“They don’t have the time and energy to assess the quality,” Carpenter said. “They’re sort of drowning under the load of expectations on them, and so they think, ‘Well, this is a highly rated resource, and so I’m going to print it off and give it to my students without really looking at it.’”
AI fuels cottage industry of curriculum creators
Some of the tells of AI-generated content are relatively subtle.
When Elisa Greb, an eighth grade English teacher outside of Pittsburgh, is on the lookout for material made by AI, she watches for bulleted lists with bolded headings, for example.
Greb said she started noticing the proliferation of AI content about a year ago. Greb rarely turns to TPT for class content, but occasionally turns to it for grammar content, which can be one of the hardest topics to hook students’ interest.
“One of the greatest joys for me as a teacher is the creativity,” she said. “What really bothers me on something like TPT, where people are monetizing, is that they’re asking for your money for something that they didn’t actually create.”
Chalkbeat also spotted what look to be AI suggestions for titles that might help the resource appear prominently in search results, price suggestions, and even disclosures that content had been generated by AI.
But if AI-generated content on TPT sets off algorithmic red flags, it seems no one has told the cottage industry of content creators who advertise themselves as coaches for folks wanting to start a TPT shop.
In one YouTube video, a creator said that leveraging AI isn’t about replacing creativity, but “multiplying our efforts” to supply teacher resources online. Many of the coaches encouraging AI use also caution TPT creators to edit and watch for quality issues in AI-generated content.
Catharyn Shelton, a professor with Northern Arizona University, said teachers sharing content with other teachers is in principle a good idea — when the content is of good quality. But scaling up the model into a marketplace is often where the problems come in, incentivizing creators to build shops with thousands of pages of material and sacrifice quality in the process.
It’s easy to turn “to slop because AI is so good at making things sound really good,” she said. “Even if the actual content or ideas aren’t really there.”
‘I do use AI-assisted tools’
Chalkbeat reached out to a few TPT vendors selling what appeared to be AI-generated materials.
Jade Désautels, the creator behind The Garden of Art, the store that sold the Black inventors posters featuring George Crum, wrote that she became an educational resource creator after 15 years as a full-time teacher.
She declined an interview and did not directly acknowledge using AI, but wrote that she uses a “variety of digital tools as part of my creative process.” Désautels also wrote she reviews resources before publishing them.
In another instance, a set of posters about musical instruments in Black history included an image of a traditional African drum and the words “add a performer playing it in a lively village setting.” There is no performer or village in the image.
A user wrote in a review that the $4.28 posters were “poorly made” and “it was very obvious that AI was used.”
The creator of that resource, Achraf Zenmrouni, said over email that they had adjusted and improved the graphics after Chalkbeat inquired about the work. Zenmrouni wrote that “I use AI-assisted tools as part of my design and creative process,” but added they personally reviewed the material before it goes live.
A Chalkbeat reporter asked ChatGPT to respond to inquiries about supposed low-quality, AI-generated teacher resources as if it were a creator of those resources. In part, the AI wrote, “I do use AI-assisted tools as one part of my creative process.”
ChatGPT then added: It reviews the content before it’s published.
Note to readers: I’ve been writing this piece on and off for a couple of years. It’s longer than my usual posts, and gets into some detail about shoplifting and the retail industry, but I hope you’ll agree that it’s worth it. If you like it, post it or send it to a friend! -Danny
Many decades ago, humans developed a process by which they could go into a store, pick an item off the shelf, and pay for it at the checkout counter. A few years ago, we lost it. Now you ring a buzzer, wait for an overworked employee to unlock an item that costs $5.99, and navigate the emotional complications of feeling like both a suspected criminal and an entitled ass.
The late Soviet Union was damned by the iconic image of people waiting in endless lines for scarce consumer goods. When we look back at the dying days of America, perhaps we’ll think of waiting in dots, surrounded by plentiful products locked away because our bosses fear and loathe us so much they have forgotten how selling things works.
Why has our society gone backward in this small but really annoying way? Surely there must have been an epidemic of shoplifting? No, there really wasn’t. Instead, the great lotion lockup was a corporate moral panic, which has been a disaster for their profits and for the rest of us a degrading enshittification of running basic errands.
It’s far from the most important way our lives have gotten worse, but it might be the most pointless – which makes it useful for understanding so much else about a moment in history defined by breathtaking self-sabotage.
What’s happened to going to the Walgreens or Target is a store-sized version of what’s happened to living in America. It’s the experience of being subject to the decisions of a ruling class that responds to every challenge with authoritarianism, greed, and the same levels of poise and wisdom as an inbred Pomeranian.
This story, like many others in the larger narrative of American derangement, begins with the panicked reactions to the summer of COVID and Black Lives Matter.
In the early years of this decade, retail chains announced the closure a number of urban store locations. This shouldn’t have been a surprise given that the pandemic had accelerated the shift to online shopping — and maybe CVS and Rite Aid had overreached by seemingly having stores on every other block.
You probably remember headlines about brazen smash-and-grabs at high end retail stores, and helpless urban business owners forced to close up shop in the face of widespread theft and perhaps civilizational collapse. What was happening, we were told, was not just a few incidents being endlessly passed around social media, or a temporary spasm of pent up pandemic aggression, but the work of dangerous new criminal syndicates.
Shoplifting no longer fits its traditional mold as a nonviolent crime perpetrated mostly by teens or substance-abusing adults. Nearly two-thirds of the retailers surveyed by the National Retail Federation said that violence associated with store thefts has risen, led by organized gangs that resell the goods they steal.
As politically impactful as store closures were, the defining image of the shoplifting panic was the lockup of toothpaste and tampons behind a plexiglass prison. My friend Amy started referring to her local CVS as “shampoo jail.” We had entered the era of mascara incarceration, of detergent detention, of — and I promise this is the last one:
the ham hoosegow
Photo: Twitter/@willystaley
Whatever you called it, plexiglass was suddenly everywhere. During an earnings call in 2023, a Rite Aid executive said that stores were “literally putting everything behind showcases to ensure the products are there for customers who want to buy it.”
But how many of us would still want to buy products we could no longer take to the checkout counter ourselves? Some industries can get away with steadily making the customer experience worse. Airlines and a certain search engine, for example, operate as a cartel and monopoly, respectively, which means there’s little we can do about how much more they suck each year. Retail stores, on the other hand, exist in a shadow of the Bezos Behemoth, which made their decision to degrade the in-store shopping experience a disaster.
In 2024, a retail customer survey found that almost half of customers “will turn to third-party retailers like Amazon when encountering locked items.” The report also noted that untold sales are lost when plexiglass prevents customers from impulsively buying other items they encounter: “Each locked display case potentially represents lost opportunities for spontaneous sales.”
Thanks to the new policy of making it harder and more aggravating to buy things, in-store sales at retail drug stores have taken a nosedive. In early 2025, Walgreens CEO Timothy Wentworth bluntly acknowledged the industry’s own-goal: “When you lock things up… you don’t sell as many of them. We’ve kind of proven that pretty conclusively.”
Two months later, Walgreens was bought by a private equity firm after years of losses. Locking away the items it was trying sell was far from the only factor in the company’s decline, but it was widely seen as the suicidal final straw.
A vibes-driven approach to shoplifting data
Given how drastically locking up products impacted company bottom lines, you would think that this strategy must have been a response to a clear and obvious increase in theft. Incredibly, it’s not clear if there was any increase at all. Yes, we all know what we “saw” (on social media) in 2020 and 2021. But there are few accompanying statistics to back it up.
Journalist Amanda Mull, who wrote a great 2021 piece in the Atlanticthat is unfortunately behind a paywall, recently explained the surprising lack of hard data on The Big Takepodcast:
“There’s not a lot of good data available on theft rates. Often these numbers are released by industry lobby groups and people who are trying to demonstrate a phenomenon that they believe is happening from surveys that ask retail management how they feel about shoplifting, how they feel about certain types of product loss as a threat to their business. It is very squishy. They’re asking about perception instead of asking for proof.”
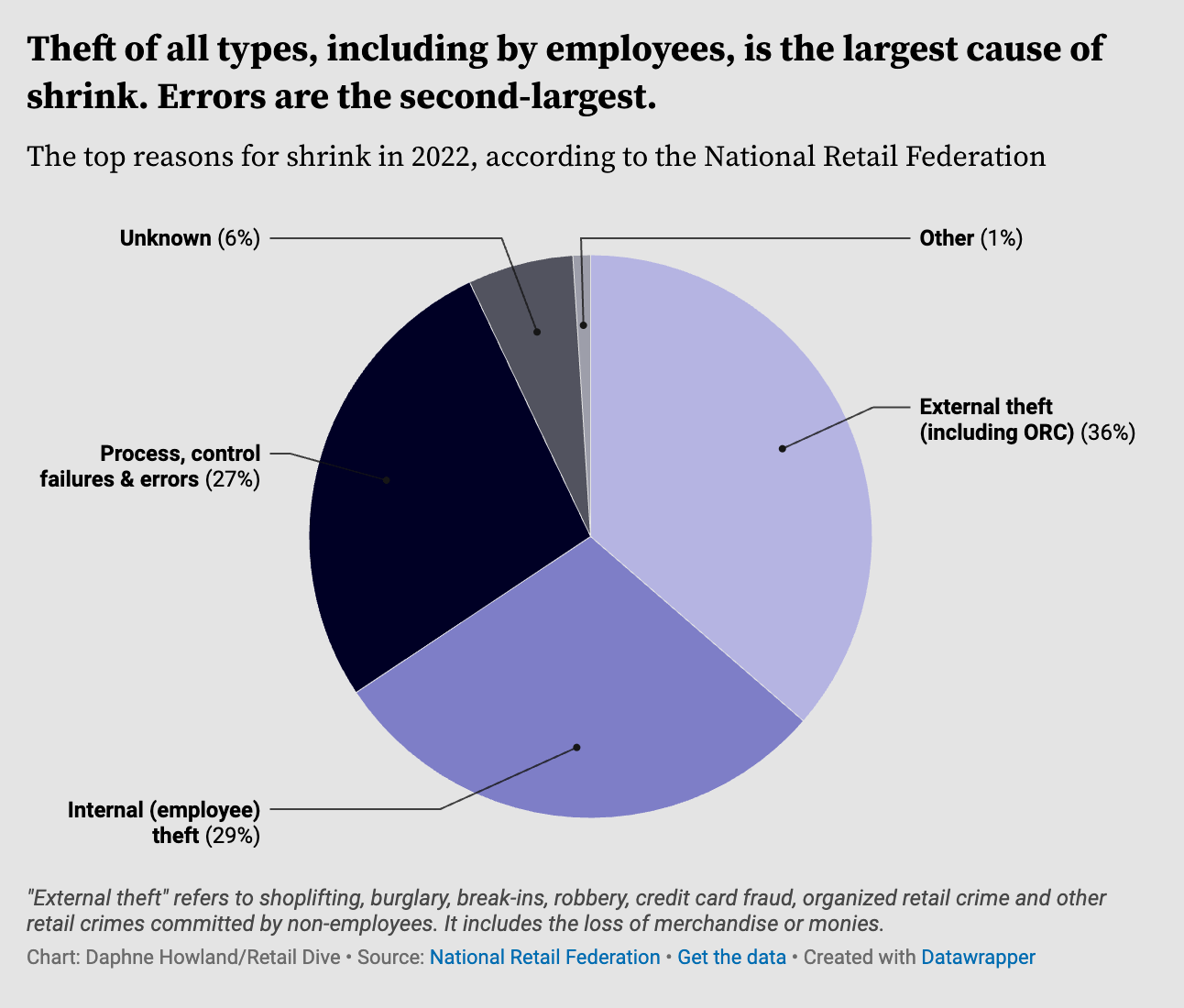
To understand what data does exist, we need to distinguish between theft and shrink, the industry term for all inventory loss.
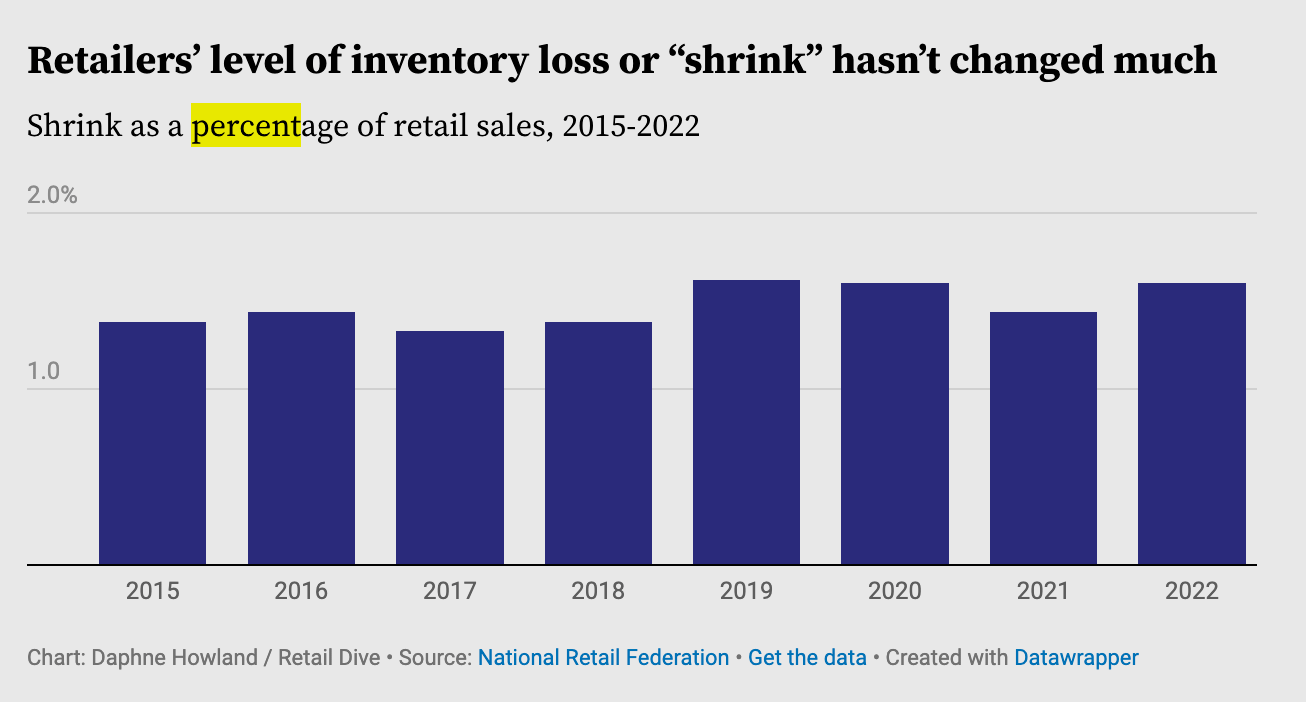
As the above graph from the industry publication Retail Diveshows, only about a third of shrink comes from outside theft, and most of the rest comes from employee theft and products being lost or damaged in any number of ways. Now let’s look at the graph below, which indicates that total shrink has barely changed over the past decade.
If there was a major spike in shoplifting, employee theft and/or other damage or loss must have gone down just as significantly, a highly unlikely event at any time, much less the hectic pandemic period.
So if it wasn’t based on hard data, why did the serious grownups at the head of these giant companies decide that they had no choice but to turn their stores into fortresses? Was it just frightened rich guy vibes? Yeah, kinda.
Here’s a quote from yet another executive from yet another earnings call, this one focused on Rite Aid locations in New York City (emphasis mine): “I think the headline here is the environment that we operate in, particularly in New York City, is not conducive to reducing shrink just based upon everything you read and see on social media and the news in the city.“
New York City supermarket magnate (and locally notorious right wing crank) John Castimiditis told Fortune that he thinks locking up items makes customers feel safe and reduces theft, but he doesn’t know because “this is not an exact science.” Indeed.
Much of the “science” that does exist comes from the National Retail Federation (NRF), which represents the interests of retail giants like Walmart, BJs, and Target. But in the years after 2020, the Federation added fuel to the fire with some suspiciously bizarre reporting errors (which were uncovered by the great reporting of Retail Dive reporter Daphne Howland.
To begin with, the NRF mistakenly listed all the inventory lost to shrink as being a result of “retail crime”, an obvious error that you now understand thanks to the graphs I made you read earlier. Even more egregiously, the NRF claimed that half of all retail shrink in 2021 was due to organized retail crime, which would have been truly unprecedented if true. It was not.
In fact, it’s estimated that ORC accounts for only five percent of inventory shrink. An industry economist told the New York Times that the fifty-instead-of-five percent error was comparable to “the census claiming that nearly half of the U.S. population lives in the state of Rhode Island.”
Blaming shoplifters for their own looting of employees
If there were temporary increases in shoplifting in different parts of the country, they were almost certainly encouraged not by Black Lives Matter protests or declining moral standards but by the industry’s ongoing drive to eliminate the most effective theft prevention solution: workers.
Industry research indicates that engaged “front-line employees” are more important for preventing shoplifting than sensors and security cameras. But employees are the one security measure that managers’ hate to pay for. This is especially in the retail industry, which for decades has reduced staffing levels and forced those who remain to endure not only low pay but “flexible” scheduling that can make it impossible to work second jobs, go to school, or have stable family lives. Here again is Amanda Mull:
“Retailers really love to reduce labor costs, and after a certain point that just means having fewer workers. When you get to that point, it becomes really hard to manage a store well. So what retailers have done is sort of retrofit stores with systems that mean in their minds that they can run stores with fewer employees. That’s what self-checkout is. And that’s what these locked up shelves are.”
Unsurprisingly, an industry already facing chronic understaffing due to crappy conditions was hit especially hard by the “Great Resignation” of 2021, leaving even fewer employees to combat shrink, either by deterring shoplifting or catching shipping errors.
Speaking of self-checkout. Have you ever been scanning your own groceries at a self-checkout and thought about how easy it would be to throw that fancy salsa in your bag without scanning it? Have you ever done more than think about it? You’re far from alone. Stores that have self-checkout have much higher rates of inventory loss than stores that don’t, and more than a quarter of people have knowingly stolen from self-checkout.
Self-checkout and locked up products may both be driven by management’s desire to reduce staffing, as Mull notes, but in combination they create a nonsensical system: have your staff walk around unlocking cases and handing customers items they will then not pay for because your staff will not be working at the checkout machines. Great plan, boss!
When the going gets tough, bosses light everything on fire
The retail industry has long accounted for certain levels of customer and employee theft as a predictable if unfortunate operating expense. The turn to self-checkout is a clear indication that the business is okay with increased shrink if it comes with lower labor costs. But these same people during these same years had a nervous breakdown over shoplifting that led them to adopt a security policy that was terrible for the bottom line. Why?
With the caveat that it’s impossible to overestimate the racist panic that rich guys felt at the sight of massive Black-led protests in 2020, I think the main factor was executives trying to keep their jobs.
The COVID pandemic greatly accelerated the shift from in-store to online shopping, bringing the doomsday threat of Amazon much closer to major retail chains like Target and Walgreens. I’m not sure if stores could have better weathered the crisis by making in-store shopping more appealing. What I do know is they found it easier to respond to a fake crisis, and in so doing made their real one much worse.
Remember those San Francisco Walgreens closures? The San Francisco Chronicle reported that there were actually few reported shoplifting incidents at those five stores, and added that “the timing of Walgreens’ decision led observers to wonder whether a $140 billion company was using an unsubstantiated narrative of unchecked shoplifting to obscure other possible factors in its decision.”
Others have had similar suspicions. In a 2023 note to clients, the investment firm William Blair wrote that “some more recent permanent store closures enacted under the cover of shrink relate to underperformance of these locations.”
Plexiglass is bad business, but great propaganda
In the summer of 2020, an online rumor spread that there would be a “loot out” in my neighborhood. When the day of the supposed event came, stores boarded up their stores for up to a mile away from the supposed target area. People scrawled hand-written pleas to not touch their “immigrant owned business.” The day came and went without incident. It was a rumor, shamefully amplified by the police and some local politicians. But I had a sinking feeling as I walked the neighborhood that day, that BLM would get the blame.
Plexiglass cases, like boarded up stores, send a powerful message of a society under siege, even when the real message should be not to trust everything we hear. Locked up goods is great propaganda for more cops, more crackdowns.
During his failed mayoral run against Zohran Mamdani, Republican Curtis Sliwa repeatedly said, “We lock up toothpaste in a drug store but we don’t lock up criminals.” It’s an effective line that connects with the feeling when we encounter plexiglass being collectively punished for the sins of a few bad apples (our mistake being to think of those apples as shoplifters rather than CEOs).
Studies show that when customers encounter locked up products, they assume it’s because there is a major theft issue. Of course we do. We may think companies are immoral, but that’s because we assume they are coldly dedicated to their bottom line, not making billion dollar decisions based on something someone sent them on Facebook.
The left has never been immune from this mistake. We often look for some rational ruling class plan where only bigotry and short-termist idiocy exist. In “The Civil War in France”, Marx was making a point about the benefits of the immediate recall of delegates when he added a comment that has aged quite poorly:
“It’s well known that companies in matters of business generally know how to put the right man in the right place and if they make a mistake to redress it.” (It’s probably the dumbest sentence he ever wrote, and the only one you’ll never hear a capitalist complain about.)
Recently, retail has been trying to quietly walk back from its lockdown folly. A Walgreens executive admitted that “maybe we cried too much” about shoplifting and organized retail crime. But once the wheels of criminalization get moving, they aren’t easy to stop.
This May, the House passed the Combatting Organized Retail Crime Act (CORCA), which would create a new center within Homeland Security that would “strengthen collaboration among federal, state, and local law enforcement agencies, along with retail crime associations, to create a cohesive strategy to combat organized retail and cargo theft.”
CORCA has been included in the Senate in the 2027 National Defense Authorization Act, so we can expect the largely non-existent issue or organized retail crime to become a federal priority. (Meanwhile, the actually existing threat of organized crime networks stealing poor people’s SNAP benefits continues to be largely ignored in states like New York.)
Equally ominous is a new system being developed by CVS, in which customers with the company app can unlock shelves from their phones. If this plan spreads throughout the industry (and of course it will), picking up a product with your own hands will become a privilege you can only have in exchange for giving more personal information to the company.
Will this be the final, camel-back-breaking, indignity? How far will we let these stores degrade us before we rise up to free the shampoo? I don’t have the answers, but I have to think that the arc of history bends back towards being able to touch a stick of deodorant.
When it does, how will the people rise up to free our imprisoned consumer goods? Maybe it will come through civil disobedience campaigns, where dozens of us ring every damn “Assistance Needed” button in the store. Or perhaps it will be the fire next time, and angry mobs people will descend in fury on the chain stores to take back our shelves, and the bosses who built all these locked cases will see that they only created more walls to be torn down.
Thanks for reading Revolution for Cowards! Subscribe to get new posts in your inbox. Subscribe for money for the same plus karma.
Imagine holding the line for another generation, banning the use of GenAI in computing education, and avoiding the hard work of reinventing objectives, assignments, assessments, courses, and curricula. Students in 2040 arrive in our CS1 lectures having relied on these tools in the same way as today’s “digital natives” have relied on ubiquitous Internet access and communication tools. Continuing with longstanding tradition, we ask them to average rainfalls or check whether a string is a palindrome.
Do we have any belief that our students will learn anything of value in such a world?
Ignoring GenAI is not an option. Bans cannot work unless we can provide secure environments even for large project-based programming assignments, and students educated in such a restrictive regime will be at a disadvantage relative to learners who interact with GenAI tutors. We cannot prepare students for careers in either industry or academia by pretending that GenAI does not exist.
Indeed, the norm is already shifting to students and professional engineers using these tools. None of us call ourselves compiler-assisted programmers today, and future software engineers will not refer to themselves as AI-assisted.
It is our responsibility as educators to adapt to this rapidly changing technical context. Indeed, many of these changes we suggest here have been discussed for years before the advent of GenAI. While none of us is happy with the timing or urgency of the GenAI (r)evolution, as a discipline we should be wise enough to not let the crisis go to waste.
Writing Code Is No Longer the Challenge
Most current curricula have been predicated on the notion that writing code is the challenging task. However, with GenAI, the production of code is no longer the bottleneck for students or professional engineers. Instead, the key challenges lie both before and after the production of code. In the realm of specification and design, we are challenged by our capacity to express our desired outcomes with sufficient precision. After the production of code, we are challenged by the difficulties of comprehending code, evaluating code quality, and validating overall correctness and trustworthiness. Embracing these challenges will bring our introductory courses to their full potential, where students can work with complex, meaningful projects that integrate all these competencies. Leaving our course outcomes, activities, and assessments unchanged in the face of GenAI poorly serves our students.
We have known and discussed aspects of these problems for many years. For instance, Harlan Mills wrote scathingly about the ways we teach syntax (while ignoring composition) as far back as 1988.5 GenAI is both enabling and forcing that long-overdue shift in focus.
Rethinking the Core of Computing Education
Changes to introductory programming (CS1) courses are the most pressing; they should be instituted with as much haste as our institutional policies can muster. But the scope of those changes should not end with introductory programming. As we shift our focus from producing code toward higher-level skills in specification, design, and verification, we will find opportunities to focus on higher-level concepts throughout the curriculum. We believe the learning outcomes of a core “computing education” must focus on comprehension, specification, usability, design, quality, verification, and validation. We expect that this core computing education would be applicable across the entire family of related computational disciplines. Specification and verification are just as valuable in data science, software engineering, and computational biology as in a general CS program.
Much of the focus of this core computing education sequence can be described as “leveling up” the competencies of our students and our discipline. In order to effectively use GenAI, succeed in industry, communicate with academic colleagues, or understand changing technology, our students need a deeper understanding of core competencies and more precise use of computing vocabulary. Let us teach our students how to effectively, critically, and ethically use GenAI for lower-level code writing under human guidance. This frees the human (student or professional) to focus more on higher-level competencies such as design (specify and prompt), orchestrate (problem solving and decomposition), and evaluate (verification and validation), as shown in the accompanying figure.
Figure. Shift in competencies (before vs after the emergence of GenAI). Before GenAI, the bottleneck was producing code; After GenAI, there is a shift in competencies toward prompting, orchestrating, and validating (while GenAI takes care of code generation).
CS curricula requirements have generally only evolved through accretion. We may wish to use this reimagining of the first half of computing programs as a once-in-a-generation opportunity to reconsider the rest of our curriculum requirements, including those that are less essential in this new era.
Student Behavior
The ubiquity of GenAI has already shifted student behavior, but that behavior will continue to evolve. We must adapt our education mechanisms to address new metacognitive skills that are needed in a world with GenAI; curiosity, independence of thought, reading critically, and evaluating quality are paramount. Students who use GenAI as an ever-present and infinitely-patient tutor could be empowered in ways that even our best students from a few years ago were not. Enhancing students’ metacognitive awareness and control requires aligning learning outcomes with appropriate assessment tasks (providing learning incentives) and scaffolded teaching/learning activities (providing learning support); otherwise, students will succumb to the temptation of unreflectively “outsourcing” all effort to GenAI and submitting GenAI slop.
Again, the need to reconsider the educational system and curriculum we provide for our students is not novel. The Computing Education Research community has been discussing the value of metacognition in introductory CS education for many years. Curriculum designers and accreditation bodies have looked for this sort of behavioral uplift through the lens of “Student Dispositions,”4 arguing that these behavioral traits are essential factors to consider when defining success for a computing degree. GenAI is forcing us to confront those needs urgently, and revise our understanding of educational success.
Program Outcomes
We are not calling for a full “burn it all down and start from scratch” approach. From a sufficiently elevated perspective, many things remain the same. Good teaching is still good teaching, although the intended learning outcomes, mechanics of assessment tasks, and teaching/learning activities have changed. Good engineering is still good engineering, although the tools have changed. Good learning is still good learning, although the tools to support learning have changed.
For example, ABET Computing Commission program outcomes for accredited CS and SE programs remain just as applicable.1 When describing proficiency in the field, the outcomes use the phrase “in the context of the program’s discipline.” These program outcomes already account for some evolution of the discipline of computing. As such, the high-level competencies and dispositions of good graduates are still generally the same, although tools and context have changed.
Catalyze Change for Quality Learning
Leading change can be challenging for individuals and institutions, but our discipline will suffocate unless we act. A renewed approach to computing education has the potential to better prepare students for successful futures in the computing profession. We envisage changes in Learning Outcomes, Assessment Tasks, and Teaching/Learning Activities.2 The following provides initial guidelines organized around three levels of ambition: Quickfix, Renovation, and Visionary.
Quickfix
Intended learning outcomes. Course learning goals must be updated to explicitly address the responsible use of GenAI, and its implications. This will impact the relative importance of topics, with code writing de-emphasised in early courses.
Assessment tasks. Create an explicit policy on GenAI use in each course. Constructing unsecured assessments predicated on the invalid assumption that students are not using AI undermines such assessments and their value. Assessments should clearly delineate between competencies students are expected to demonstrate without GenAI and with GenAI. Summative assessments should often occur in secured environments (oral or proctored written exams) and formative assessments in unsecured environments (take home assignments or projects). Unsecured assessments should aim to assess the software design process more holistically, including the full range of artifacts students produce towards this end; including, for example, design and specification documents, prompt logs, code quality, and test cases.
Teaching/learning activities: Students should be given the opportunity to learn how to use GenAI in a way that develops their awareness of their role in learning processes involving GenAI. Metacognitive skills and effective study techniques should be emphasized.
Renovation
Intended learning outcomes. Revisit the learning goals of individual courses to ensure they align with GenAI-age software design practices. An example would be modifying an introductory programming course to incorporate GenAI.6 Also consider whether any existing courses should be removed from the required curriculum or new courses should be added.
Assessment tasks. Ensure consistency in policy within groups of courses. Create open-ended and/or authentic projects for students that allow them to practice using GenAI tools.
Teaching/learning activities: Incorporate an AI Tutor (CodeHelp, CodeAid, UIUC Chat) that is designed to assist students in acquiring the intended competencies. Provide students with guidance on how to use that tool and modify instructional staff practices to provide more support; for example, 1-1 tutoring sessions, discussions of community. To encourage student engagement and development of communication skills, active learning and flipped classrooms should be considered.
Visionary
Intended learning outcomes. Reimagine the curriculum from the ground up to both address long-standing curricular issues and to embrace how to effectively, critically, and ethically use GenAI as a fundamental way of programming. For example, system design, requirements specification, and testing might be taught with increasing levels of sophistication across multiple software courses.
Assessment tasks. Create a department- or school-level policy for what students are permitted or expected to do with GenAI. For example, the University of Sydney has a policy that GenAI is permitted in all take-home assignments, and variants of their approach are being considered for adoption by several Australasian universities.
Teaching/learning activities: Create a strategy as a department to provide students with consistent learning experiences. For example, all programming courses might use the same AI tutor calibrated toward the particular course.
You Are Not Alone: There Are Resources Available to Help
Computing departments everywhere are grappling with the same challenges all at once. Cross-institutional collaborations are likely to be more effective and less time-consuming than each institution charting a path on its own. For example, revisions to accreditation standards and curricular guidelines can serve as a blueprint for everyone. Schools that successfully integrate GenAI into courses (or the whole curriculum) should share their lessons learned with one another. Indeed, example courses that can serve as a starting point for many of the early courses in the curriculum are already available.3 Educational institutions and educators should work together to ensure that students graduate more intellectually empowered, socially connected, and capable of succeeding in their studies and careers than ever before, only now with the power of GenAI.
Emerging Agentic AI Systems. Since our Dagstuhl seminar,a GenAI tools have rapidly evolved from reactive code generators into increasingly proactive, so-called agentic systems (that is, systems exhibiting limited operational agency) capable of planning multi-step solutions, autonomously invoking external tools, maintaining state across sessions, and incrementally refining outputs. This shift toward greater autonomy further reinforces our central claim: the bottleneck is no longer code production, but human-in-the-loop judgment in problem framing, orchestration, and evaluation. As AI systems take on larger portions of decomposition and implementation, students and professionals must learn to effectively supervise, constrain, and critically and ethically audit semi-autonomous computational agents. In the short term, this strengthens the need for explicit GenAI policies and secured assessments. In the longer term, it suggests that curricula should explicitly address human–AI collaboration, including oversight, accountability, and system-level design in environments where AI acts with partial autonomy.
Temporary anxiety can often surface before the first day of school. Sometimes, that can help kids get in the right mindset for a big day. But when anxiety becomes a constant feature of children’s and teenagers’ days, that stress doesn’t switch off when they leave the classroom or finish an exam. It can become the body’s normal, staying with learners long after graduation.
I teach biology and neuroscience to undergraduates, and I believe that the way we educate our children – prioritizing performance and grades over curiosity and well-being – is producing a society full of anxiety-ridden adults.
A recent survey of over 84,000 college students found that one-third of them self-reported moderate or severe anxiety, and roughly the same share self-reported depression.
I’ve seen this unfold in ways I am only just starting to understand. A few years ago, one of my neuroscience students, whom I will call Hannah to protect her privacy, described how she experienced high school only as a way to get a scholarship to attend college. She became, in her words, a “complete robot.”
“I developed extreme anxiety; it like completely took over my life,” she said. “There was no excitement to learn.”
Learning, as experienced by young children, is normally very rewarding. When organic, it is delightful, immersive, timeless and fun.
Curiosity itself triggers a dopamine response in children’s brains. Researchers describe it as a “curiosity loop,” in which the brain predicts something, runs into something new or unexpected, releases dopamine, and the child is hooked, chasing the answer because it feels good to find it.
As kids grow, they take on more homework and more exams, and have more evaluation tied to specific benchmarks, like grades, which can inadvertently cut off the curiosity loop.
Some educators argue that grades help keep students accountable, push them to work harder even on material they wouldn’t otherwise prioritize, and give teachers a shared standard, however imperfect, for tracking whether learning is happening.
Others argue, meanwhile, that grades are not actually an accurate representation of what students are learning. They can also cause students to experience academic pressure.
Research shows that a high degree of academic pressure stems from fear of failure, chronic stress about workload and exams, worry about parental expectations and competition with peers for grades.
Though many things impact well-being, academic pressure is related to kids’ mental health in a well-documented way. A 2026 study, for example, found that academic pressure to achieve at age 15 can predict depressive symptoms that persist into adulthood.
Grades aren’t the only source of pressure that students experience. Social comparison plays a role, too, along with the pressure to only answer questions when they’re already sure, to never seem confused and to stay constantly productive.
Based on my experience and research, kids pick up on the message that they should keep their curiosity at a 5 out of 10 scale, instead of a 10 out of 10, especially if it strays outside the curriculum.
Learning to avoid fear and pain
A theory dating back more than 100 years suggested that there is an optimal amount of stress for good performance, based on a study that had nothing to do with humans.
Researchers ran mice through a maze, using electric shocks to punish wrong choices. On harder tasks, moderate shocks produced the fastest learning, while stronger shocks made it worse. Over the years, this got reinterpreted into claims about punishment, reward, motivation and stress in humans.
But the original study was about how animals learn to avoid fear and pain, not about optimal learning at all. Once a mouse learns to avoid a shock, escape itself triggers dopamine release; in other words, the escape – not the discovery – is the reward.
How stress shapes the brain
In 1855, engineers coined the word “stress,” from the word “distress,” to describe a beam pulled, pushed or twisted from multiple directions until the strain shows as a deformation.
Apply distress to a young brain, and the deformation isn’t just in the education process, but in the neurodevelopment of people’s minds.
Chronic stress also reshapes the prefrontal cortex, impairing our ability to manage stress overall. Each stressor lowers the bar for the next one, until anxiety becomes less a reaction than a preset that follows a student long after they’ve left the classroom.
Chronic stress has implications for general health too, and can cause inflammatory and autoimmune symptoms. I see conditions like chronic pain and panic disorders in my students every semester.
Unlearning old habits
In college, Hannah shared that she is still healing from some of that anxiety and has worked to “unlearn the study habits” she developed in high school.
“I was that person always in the library, like you’re going to study, study, study. Wake up at 5:30, do this. Check every box perfectly and not halfway,” Hannah said.
Through journaling and reading, Hannah began noticing the subconscious patterns she’d been repeating since childhood. That process, along with years of talk therapy, let her separate real learning from what she calls “programming,” so she no longer needs that rigidity to feel like she was learning.
I interviewed Hannah this past spring as part of a book I am writing about how people actually experience learning, and what a living systems approach to education could offer them instead. Living systems theory says the goal of a system is what it actually produces, not what it intends – an idea I’m applying directly to education.
This plays out in our current educational environment in the United States. In my view, even if educators, parents and policymakers say their intent is to build lifelong learners, they are reliably producing anxious, burnt-out students. Anxiety, then, is functionally what our education system’s goal is.
It’s not what the system says it does, it’s what it does.
Engineers coined the word ‘stress’ in 1855 from the word ‘distress,’ to describe a beam being pulled or twisted until it shifts shape and develops a deformation.Klaus Vedfelt/DigitalVision/Getty Images
A different approach
Since I’ve learned that at least a third of students in my college classrooms are struggling with mental health, I’ve changed the way I teach. I have altered my courses to seek out pockets of wonder, simultaneously supporting learning and well-being.
In my 300-person course with pre-med students, I no longer only teach through lecturing. Instead, I emphasize our humanity and curiosity, while also teaching very difficult content. I provide a solid structure, emphasize that everyone belongs and ask them to teach each other. I use real-world situations and games, give students choice within their assignments and offer opportunities for reflection.
And yes, I use a traditional grading system.
Learning can require persistence and struggle, and no one benefits from a classroom without challenge. But struggle and dread aren’t the same thing.
Does stress belong in learning? Maybe, maybe not.
The first step is recognizing that the U.S. built an education system that runs on stress – not because we meant to, but because most people did not notice.
AlphaFold was a machine learning system from Google Deepmind. It did protein folding.
It was usably good at guessing protein structures. It caught public attention by doing really well in the Critical Assessment of Structure Prediction benchmarks.
AlphaFold did some useful work — mostly as an extra to help biologists predict a structure they were working on. A lot of biologists didn’t find it useful, some did. That’s fine.
I’m saying “was” and “did” about AlphaFold because Google killed it. [FT, archive]
The original founders of AlphaFold have mostly been reassigned over the past year. Google moved several of them to work on the Gemini chatbot. About a quarter left Google entirely.
Google moved Jumper to working on … fixing AI computer coding in Gemini. He left Google for Anthropic shortly after. A DeepMind employee told the FT that:
their departures had sparked surprise internally.
I’m shocked the Nobel-winning researcher wanted to do research, not product work.
Google’s real use case for AlphaFold was not the biology. It was to have a handy excuse for the excesses of the AI bubble.
Whenever chatbots are being garbage, some bozo will always say: what about medicine, huh? What about AlphaFold, huh?
Google was careful not to quite claim that AlphaFold would cure cancer. There’s laws about that. But they did talk about AlphaFold and cancer in the same press release blog posts a whole lot.
grind for a decade trying to help make superintelligence to cure cancer or whatever
Whenever an AI bozo says AI will cure cancer, they’re saying out loud what Google was trying to imply quietly. But even that hype no longer does enough work for Google to keep funding it.
What now? Google’s Isomorphic Labs is trying to commercialise AlphaFold output. The AlphaFold models and data continue to be developed at OpenFold, which is useful enough it’s attracted a pile of sponsors. [OpenFold]
But to Google, not even a Nobel Prize was worth keeping AlphaFold around. Yeah, we’re gonna put you on the chatbot, mate. That’s fine, right?
Suppose I’m asked first and I answer no. This tells you that I’m not holding the number 1, because if I were I’d know for certain that you held 2.
The interlocutor turns to you and asks whether you know my number. You say no. This tells me that you don’t hold 2, by the same principle — I know that you just inferred that I’m not holding 1, so if you held 2 you’d know that I must have 3.
And so on. Together we’ll work our way up the number line until one of us says yes.